Materiale hardware
[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Arduino Uno” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”272″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”” link=”https://amzn.to/2IsbEy7”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”.vc_custom_1631994248145{margin-top: -15px !important;}” link=”https://amzn.to/2IsbEy7”][/vc_column][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Cavi Dupont” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”265″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”” link=”https://amzn.to/2Ir6qCK”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”.vc_custom_1631994248145{margin-top: -15px !important;}” link=”https://amzn.to/2Ir6qCK”][/vc_column][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Servo 9G” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”1093″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”” link=”https://amzn.to/38iMnFX”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css=”.vc_custom_1631994248145{margin-top: -15px !important;}” link=”https://amzn.to/38iMnFX”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Materiale Software
Procedura
Per prima cosa, colleghiamo il servo motore all’Arduino UNO, come da immagine:
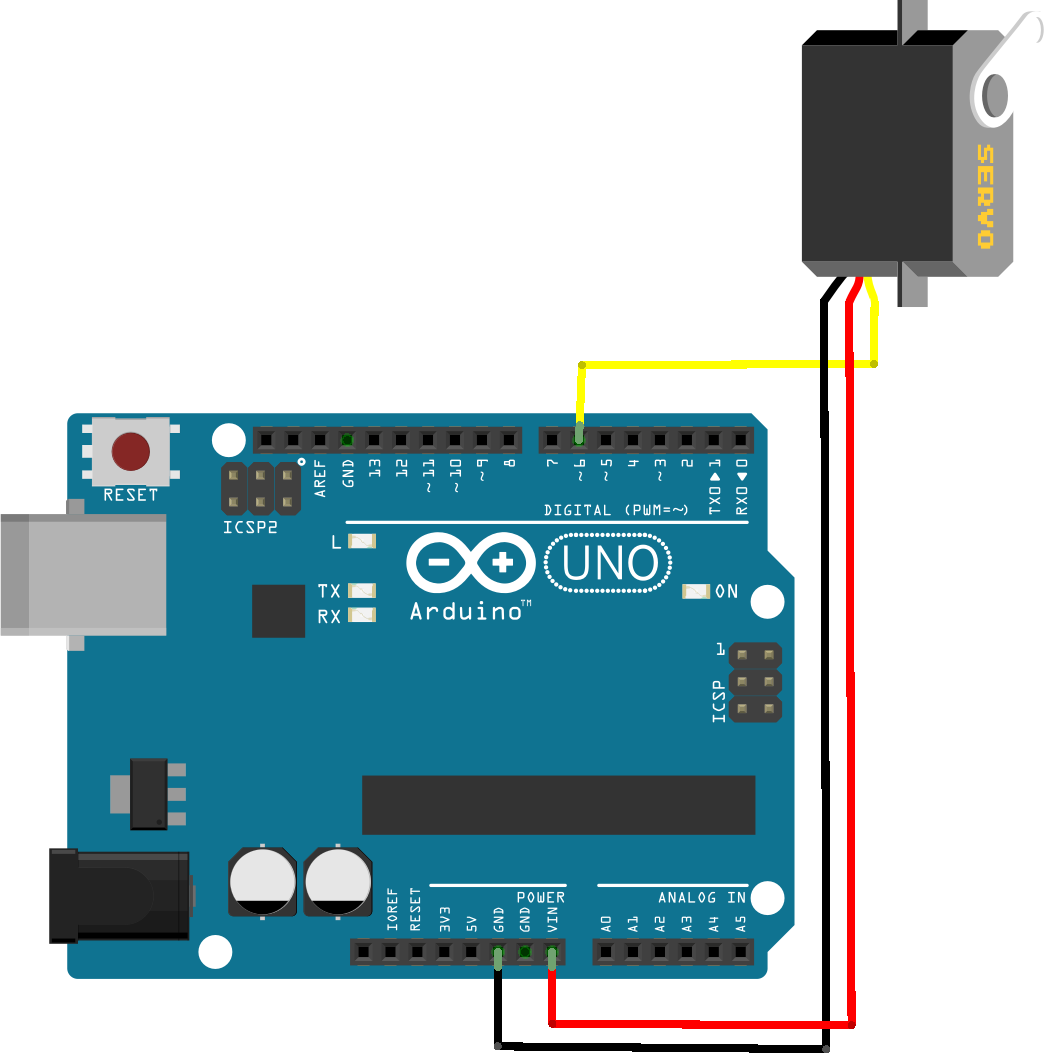
Il filo di colore arancione è quello dei dati, e andrà collegato ad uno dei pin digitali dell’Arduino. Il filo di colore marrone è la massa (GND) e va collegato ad uno dei pin GND di Arduino. Il filo di colore rosso è l’alimentazione, e va collegato al pin 5V di Arduino.
Nel caso si vada ad utilizzare servo motori che consumano più di 500mA è consigliabile utilizzare una sorgente di alimentazione esterna, mettendo la massa in comune con Arduino. Questo perchè il pin 5V di Arduino è in grado di erogare massimo 500mA, che se superati, c’è il rischio di danneggiare il regolatore presente sulla scheda.
Una volta effettuati i collegamenti passiamo alla programmazione della scheda. Apriamo l’IDE di Arduino e incolliamo un semplice sketch che ci permetterà di ruotare il servo in base ai gradi che impostiamo.
#include <Servo.h>
// Crea oggetto servo1 dalla libreria servo
Servo servo1;
void setup() {
// Inizializza servo1 su pin 6
servo1.attach(6);
}
void loop() {
// Imposta il servo a 180 gradi
servo1.write(180);
delay(200);
// Imposta il servo a 160 gradi
servo1.write(160);
delay(200);
// Imposta il servo a 110 gradi
servo1.write(110);
delay(200);
// Imposta il servo a 90 gradi
servo1.write(90);
delay(200);
// Imposta il servo a 60 gradi
servo1.write(60);
delay(200);
// Imposta il servo a 30 gradi
servo1.write(30);
delay(200);
// Imposta il servo a 10 gradi
servo1.write(10);
delay(200);
}
Una volta caricato il servo inizierà a muoversi nei vari angoli impostati. L’istruzione che permette di impostare il servo ad un determinato angolo è: servo1.write(°Angolo);
Lo sketch di esempo modificherà l’angolo del servo ogni 200 millisecondi.
In caso si voglia utilizzare più di un servo motore è possibile creare un ulteriore oggetto Servo ed inizializzarlo, ad esempio:
#include <Servo.h>
// Crea oggetti servo1 e servo2 dalla libreria servo
Servo servo1, servo2;
void setup() {
// Inizializza servo1 su pin 6
servo1.attach(6);
// Inizializza servo2 su pin 7
servo1.attach(6);
}
void loop() {
// Imposta il servo 1 a 180 gradi
servo1.write(180);
// Imposta il servo 2 a 0 gradi
servo2.write(0);
}
In questo sketch di esempio inizializziamo 2 servo chiamati rispettivamente servo1 e servo2 sui pin digitali 6 e 7, dopodiché nella funzione loop li impostiamo a 180 e 0 gradi.
Conclusione
Il servo utilizzato in questo articolo è un modello di tipo 9G, dicitura che troviamo molto spesso nell’acquisto di questi motori, che sta ad indicare il loro peso (senza i cavi di collegamento), utile nella scelta in caso di costruzione di un aeromodello.
Manipolando le varie istruzioni sarà possibile adattarle ad ogni progetto che necessita di un servo o più, per qualsiasi dubbio o domanda lascia un commento.
[/vc_column_text][/vc_column][/vc_row]