
[vc_row][vc_column][vc_column_text]In questa guida vedremo come utilizzare il sensore di inclinazione (tilt), con Arduino UNO. Il sensore di inclinazione può essere utilizzato per rilevare impatti, vibrazioni, o eventualmente l’orientamento del nostro progetto. Purtroppo però questo sensore non ci darà valori precisi riguardanti l’orientamento o inclinazione, sarà l’equivalente di un bottone: si o no (1 o 0, a seconda della direzione). Per questo il codice sarà identico a quello utilizzato per un bottone.
Materiale hardware
[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Arduino Uno” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”272″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2IsbEy7” css=”.vc_custom_1631994204045{margin-top: -15px !important;}”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2IsbEy7” css=”.vc_custom_1631994248145{margin-top: -15px !important;}”][/vc_column][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Cavi Dupont” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”265″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2Ir6qCK” css=”.vc_custom_1631994204045{margin-top: -15px !important;}”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2Ir6qCK” css=”.vc_custom_1631994248145{margin-top: -15px !important;}”][/vc_column][vc_column width=”1/4″ offset=”vc_col-lg-offset-0 vc_col-lg-3 vc_col-md-offset-0 vc_col-md-4 vc_col-sm-offset-0 vc_col-xs-6″][vc_custom_heading text=”Sensore Tilt” font_container=”tag:h6|text_align:center” use_theme_fonts=”yes”][vc_single_image image=”505″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2UZfjdn” css=”.vc_custom_1631994204045{margin-top: -15px !important;}”][vc_separator css=”.vc_custom_1631976821913{margin-top: -40px !important;}”][vc_single_image image=”1112″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” link=”https://amzn.to/2UZfjdn” css=”.vc_custom_1631994248145{margin-top: -15px !important;}”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Materiale Software
Procedura [vc_btn title=”Video” style=”outline-custom” outline_custom_color=”#2b2b2b” outline_custom_hover_background=”#2b2b2b” outline_custom_hover_text=”#ffffff” size=”xs” i_icon_fontawesome=”fa fa-youtube-play” add_icon=”true”]
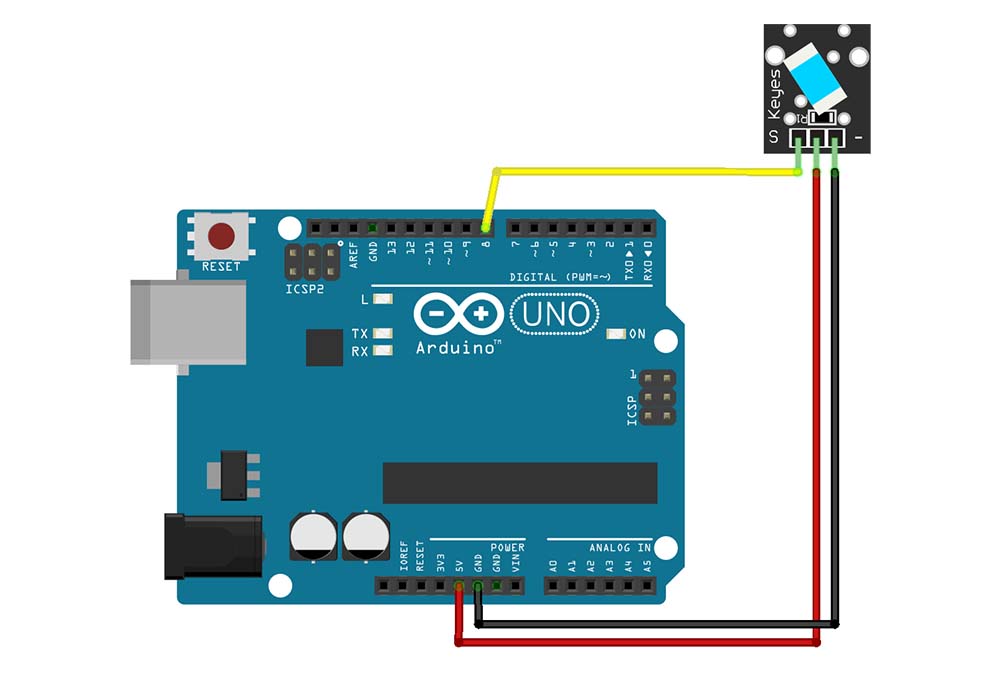
Per prima cosa, colleghiamo il sensore all’Arduino tramite 3 cavi dupont maschio-femmina nel seguente modo:
- Il pin “S” del sensore, ad uno dei pin digitali dell’Arduino UNO, in questo caso utilizzeremo il pin 8;
- Il pin “–” del sensore, al pin GND dell’Arduino;
- Il pin centrale (5V) al pin 5V dell’Arduino.
Finito i collegamenti apriamo l’IDE di Arduino e incolliamo e carichiamo il seguente codice:
#define SPIN 8 //Pin a cui è collegato il sensore
int val; //Variabile in cui inseriremo il valore letto dal sensore
void setup() {
pinMode(SPIN,INPUT); //Imposta il pin 8 in modalità input
Serial.begin(9600); //Inizializza la comunicazione seriale
}
void loop() {
val=digitalRead(8); //Inserice all'interno della variabile val il valore letto dal sensore
Serial.println(val); //Invia tramite seriale il contenuto della variabile val
}
Conclusione
Ora muovendo il sensore vedremo che il valore visualizzato sul monitor seriale varierà tra 0 e 1, a seconda dell’inclinazione.[/vc_column_text][/vc_column][/vc_row]